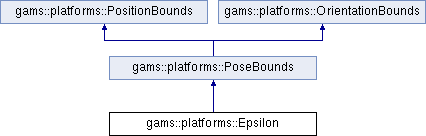
A simple bounds checker which tests whether the current position is within the given number of meters of the expected position, and whether the difference in angles is within the given number of radians.
More...
#include <BasePlatform.h>
A simple bounds checker which tests whether the current position is within the given number of meters of the expected position, and whether the difference in angles is within the given number of radians.
Definition at line 142 of file BasePlatform.h.
| gams::platforms::Epsilon::Epsilon |
( |
| ) |
|
|
inline |
Use default values for position and angle tolerance.
Definition at line 147 of file BasePlatform.h.
| gams::platforms::Epsilon::Epsilon |
( |
double |
dist | ) |
|
|
inline |
Use default value for angle tolerance.
- Parameters
-
| dist | the position tolerance (in meters) |
Definition at line 152 of file BasePlatform.h.
| gams::platforms::Epsilon::Epsilon |
( |
double |
dist, |
|
|
double |
radians |
|
) |
| |
|
inline |
Use specified tolerances.
- Parameters
-
| dist | the position tolerance (in meters) |
| radians | the angle tolerance (in radians) |
Definition at line 159 of file BasePlatform.h.
template<typename AngleUnits >
| gams::platforms::Epsilon::Epsilon |
( |
double |
dist, |
|
|
double |
angle, |
|
|
AngleUnits |
u |
|
) |
| |
|
inline |
Use specified tolerances, with custom angle units.
- Parameters
-
- Template Parameters
-
| AngleUnits | the units type for angle (inferred from u) |
Definition at line 171 of file BasePlatform.h.
| double gams::platforms::Epsilon::dist_ = 0.1 |
|
private |
| double gams::platforms::Epsilon::radians_ = M_PI/16 |
|
private |
The documentation for this class was generated from the following file:
 1.8.11
1.8.11 
