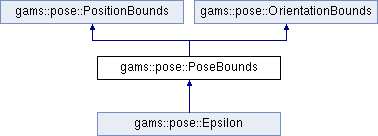
gams::pose::PoseBounds Class Referenceabstract
Interface for defining a bounds checker for Poses, a combination of position and orientation checking. More...
#include <Epsilon.h>
Inheritance diagram for gams::pose::PoseBounds:
Public Member Functions | |
| virtual bool | check_orientation (const pose::Orientation ¤t, const pose::Orientation &target) const =0 |
| Override to return whether the current orientation is within the expected bounds of target. More... | |
| virtual bool | check_position (const pose::Position ¤t, const pose::Position &target) const =0 |
| Override to return whether the current position is within the expected bounds of target. More... | |
Detailed Description
Interface for defining a bounds checker for Poses, a combination of position and orientation checking.
Member Function Documentation
◆ check_orientation()
|
pure virtualinherited |
Override to return whether the current orientation is within the expected bounds of target.
Implemented in gams::pose::Epsilon.
◆ check_position()
|
pure virtualinherited |
Override to return whether the current position is within the expected bounds of target.
Implemented in gams::pose::Epsilon.
The documentation for this class was generated from the following file:
- src/gams/pose/Epsilon.h